GaussianCaR: Gaussian Splatting for Efficient Camera-Radar Fusion
🏆 Accepted to IEEE ICRA 2026! See you in Vienna, Austria.
GaussianCaR projects camera pixels and radar points into BEV using Gaussian Splatting as universal view transformer, enabling fast and accurate multi-sensor fusion.
📝 Abstract
Robust and accurate perception of dynamic objects and map elements is crucial for autonomous vehicles performing safe navigation in complex traffic scenarios. While vision-only methods have become the de facto standard due to their technical advances, they can benefit from effective and cost-efficient fusion with radar measurements. In this work, we advance fusion methods by repurposing Gaussian Splatting as an efficient universal view transformer that bridges the view disparity gap, mapping both image pixels and radar points into a common Bird’s-Eye View (BEV) representation.
Our main contribution is GaussianCaR, an end-to-end network for BEV segmentation that, unlike prior BEV fusion methods, leverages Gaussian Splatting to map raw sensor information into latent features for efficient camera-radar fusion. Our architecture combines multi-scale fusion with a transformer decoder to efficiently extract BEV features.
Experimental results demonstrate that our approach achieves performance on par with, or even surpassing, the state-of-the-art on BEV segmentation tasks (57.3%, 82.9%, 50.1% IoU for vehicles, roads, and lane dividers) on the nuScenes dataset, while maintaining a 3.2x faster inference runtime.
⭐ Key Contributions
- Gaussian Splatting as a universal view transformer for heterogeneous camera-radar fusion in BEV.
- End-to-end differentiable pixels/points → Gaussians → BEV pipeline without voxelization or depth discretization.
- State-of-the-art BEV segmentation efficiency, achieving comparable or better accuracy than prior fusion methods with 3.2x faster inference.
🔬 Method
Existing BEV fusion methods struggle to jointly handle dense image features and sparse radar measurements without costly voxelization or attention-based lifting. GaussianCaR reformulates multi-modal sensor fusion as a sensor → Gaussians → BEV transformation. Unlike prior methods that rely on voxelization or costly attention mechanisms, we repurpose Gaussian Splatting (GS) as a universal view transformer to bridge the disparity between dense camera images and sparse radar point clouds.
- Pixels-to-Gaussians (Camera): We lift 2D features from an EfficientViT-L2 backbone into 3D space using a coarse-to-fine strategy, predicting Gaussian parameters (position, size, opacity) to mitigate depth discretization errors.
- Points-to-Gaussians (Radar): A lightweight Point Transformer v3 encodes radar returns, transforming sparse points into Gaussians with learnable covariance matrices to explicitly model spatial uncertainty.
- Unified Fusion: Features from both sensors are differentiably rasterized into a common BEV grid and integrated via CMX-based fusion layers and a DPT decoder, achieving state-of-the-art segmentation (57.3% IoU) at 75.6 ms inference speed.
This architecture allows GaussianCaR to achieve state-of-the-art performance on nuScenes (57.3% IoU for vehicles) while maintaining a high inference speed (75.6 ms), making it 3.2x faster than comparable fusion methods like BEVCar.
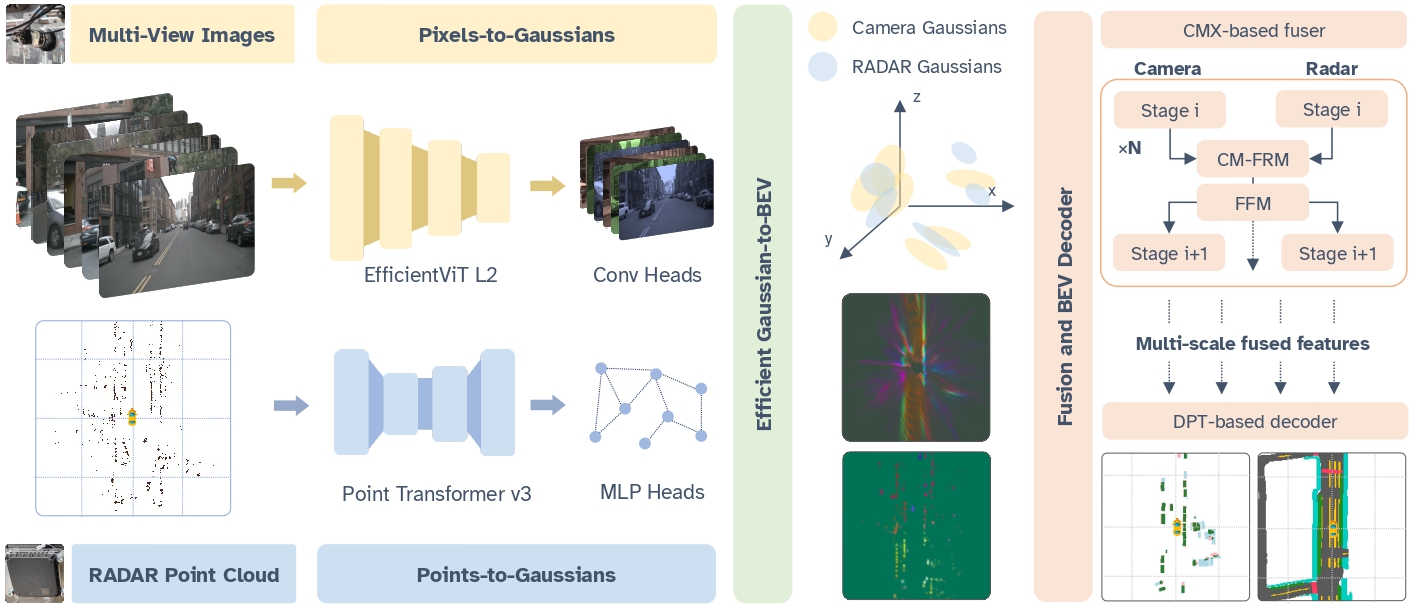
Overview of GaussianCaR. Camera pixels and radar points are converted into Gaussian primitives, splatted into BEV, and refined by a transformer decoder for BEV segmentation tasks.
📊 Results
Table I. BEV Vehicle Segmentation on the nuScenes Validation Set.
| Type | Method | Cam Enc | Radar Enc | IoU (↑) |
|---|---|---|---|---|
| Camera-only | BEVFormer | RN-101 | - | 43.2 |
| GaussianLSS | RN-101 | - | 46.1 | |
| SimpleBEV | RN-101 | - | 47.4 | |
| PointBeV | EN-64 | - | 47.8 | |
| GaussianBeV | EN-64 | - | 50.3 | |
| Camera-radar | SimpleBEV++ | RN-101 | PFE+Conv | 52.7 |
| SimpleBEV | RN-101 | Conv | 55.7 | |
| BEVCar | DINOv2/B | PFE+Conv | 58.4 | |
| CRN | RN-50 | SECOND | 58.8 | |
| BEVGuide | EN-64 | SECOND | 59.2 | |
| GaussianCaR (ours) | EVIT-L2 | PTv3 | 57.3 |
Table II. BEV Map Segmentation on the nuScenes Validation Set.
| Type | Method | Driv. Area IoU (↑) | Lane Div. IoU (↑) |
|---|---|---|---|
| Camera-only | LSS | 72.9 | 20.0 |
| BEVFormer | 80.1 | 25.7 | |
| GaussianBeV | 82.6 | 47.4 | |
| Camera-radar | BEVGuide | 76.7 | 44.2 |
| Simple-BEV++ | 81.2 | 40.4 | |
| BEVCar | 83.3 | 45.3 | |
| GaussianCaR (ours) | 82.9 | 50.1 |
Table III. Inference Speed Comparison on an NVIDIA RTX 4090.
| Method | Veh. IoU (↑) | ms (↓) | FPS (↑) |
|---|---|---|---|
| Simple-BEV | 55.7 | 57.6 | 17.4 |
| Simple-BEV++ | 52.7 | 211.3 | 4.7 |
| BEVCar | 58.4 | 245.6 | 4.1 |
| GaussianCaR (vehicle) | 57.3 | 75.6 | 13.2 |
| GaussianCaR (map) | - | 81.1 | 12.3 |
📚 Citation
@article{montielmarin2026gaussiancar,
title = {GaussianCaR: Gaussian Splatting for Efficient Camera-Radar Fusion},
author = {Montiel-Marín, Santiago and Antunes-García, Miguel and
Sánchez-García, Fabio and Llamazares, Ángel and
Caesar, Holger and Bergasa, Luis M.},
year = {2026},
eprint = {2602.08784},
archivePrefix = {arXiv},
primaryClass = {cs.RO}
}🤝 Acknowledgements
This work has been supported by projects PID2021-126623OB-I00 and PID2024-161576OB-I00, funded by MCIN/AEI/10.13039/501100011033 and co-funded by the European Regional Development Fund (ERDF, “A way of making Europe”), by project PLEC2023-010343 (INARTRANS 4.0) funded by MCIN/AEI/10.13039/501100011033, and by the R&D program TEC-2024/TEC-62 (iRoboCity2030-CM) and ELLIS Unit Madrid, granted by the Community of Madrid.